
问题背景
平单轴支架长度可超百米,地形略微的起伏都会使得支架的南北向高差过大;这会造成阴影遮挡,并且无法行走清洗机器人。

为此,一般需要对支架进行调整,使得南北相邻支架的高差在设定范围内(一般在0.3米左右),但支架立柱的可调节范围一般只有0.3米左右,必然会有立柱的长度不满足要求。因此,一般需要对场地进行平整。
本文拟对以下三种场平方案的场平量进行比较:
场平方案1:只调整支架离地高度
表1-1 方案1主要场平结果

图1-1 :方案1方阵轴线方向剖面

图1-2 :方案1土方网格
(白色填充:不动土;红色:填;黄色:挖)
场平方案2:同时调整支架离地高度和坡度
表2-1 方案2主要场平结果

图2-1:方案2方阵轴线方向剖面
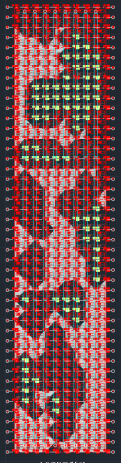
图2-2 :方案2土方网格
(白色填充:不动土;红色:填;黄色:挖)

图3-1 :方案3方阵轴线方向剖面
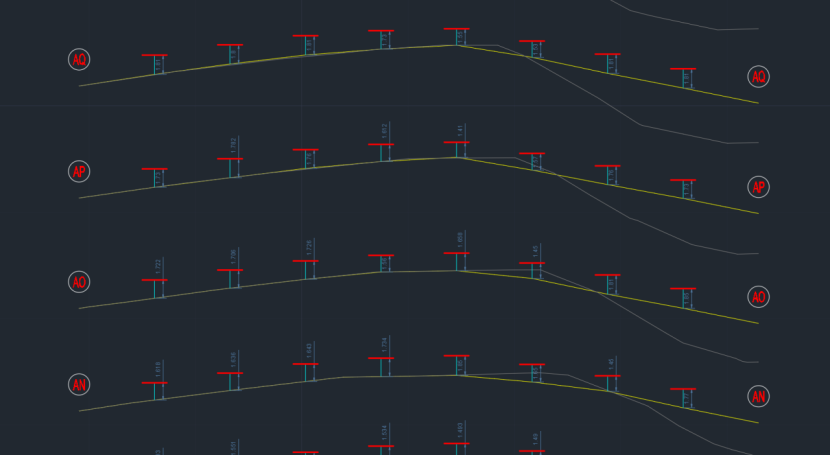
图3-2 :方案3垂直于方阵轴线方向剖面
小结
各方案的主要场平结果如下:
|
方案 |
动土面积比例% |
挖方体积 m³ |
填方体积 m³ |
净土方体积 m³ |
|
1 |
98.2 |
-4777.3 |
2208.0 |
-2569.2 |
|
2 |
72.0 |
-1653.3 |
1655.3 |
2.2 |
|
3 |
72.5 |
-881.7 |
4063.2 |
3181.5 |
从上表可以看出:
1)单纯只是调整支架的离地高度,动土面积太大,并不适合;
2)通过同时调整支架的离地高度和坡度,动土范围和土方量均明显减少;
3)控制相邻行的高差,会使得整体土方量有明显的增大,建议相邻行高差取值要慎重。