
平单轴支架长度可超百米,地形略微的起伏都会使得支架的南北向高差过大;这会造成阴影遮挡,并且无法行走清洗机器人。

为此,一般需要对支架进行调整,使得南北相邻支架的高差在设定范围内(一般在0.3米左右),但支架立柱的可调节范围一般只有0.3米左右,必然会有立柱的长度不满足要求。因此,一般需要对场地进行平整。

表1-1 方案1主要场平结果
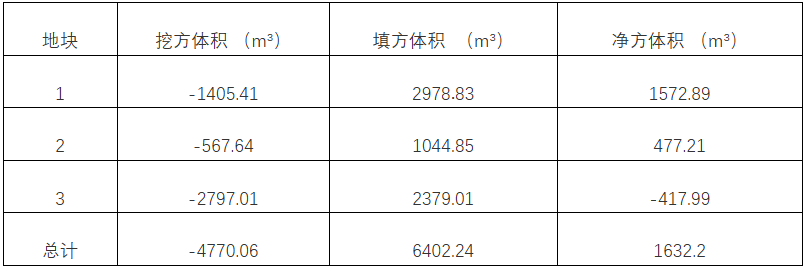
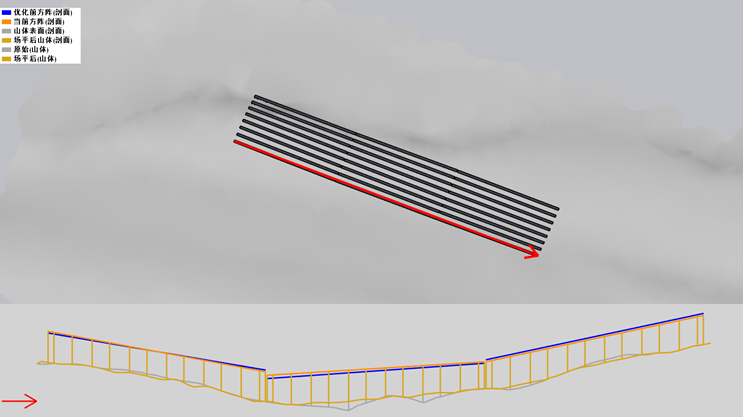
图1-1:方阵轴线方向剖面(地块1,不考虑土方平衡)
表2-1 方案2主要场平结果
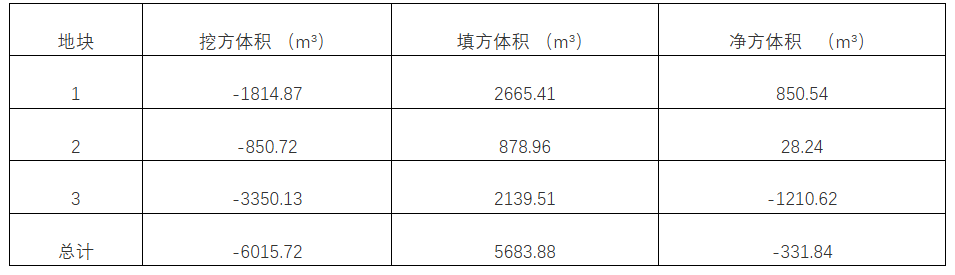
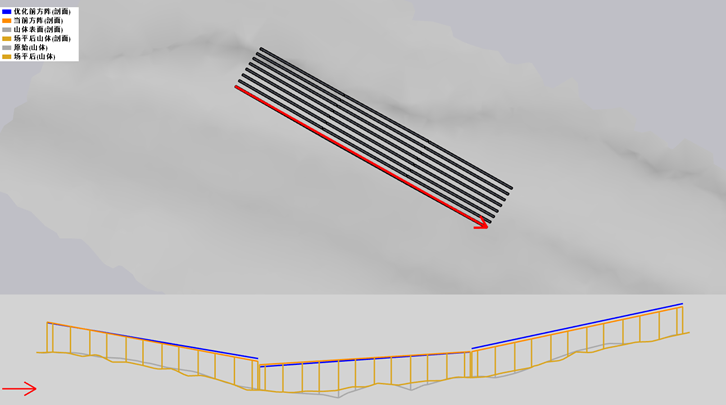
图2-1:方阵轴线方向剖面(地块1,全局土方平衡)
表3-1方案3主要场平结果
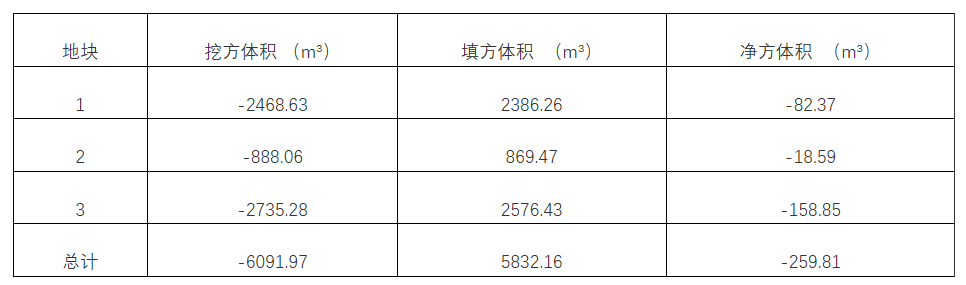
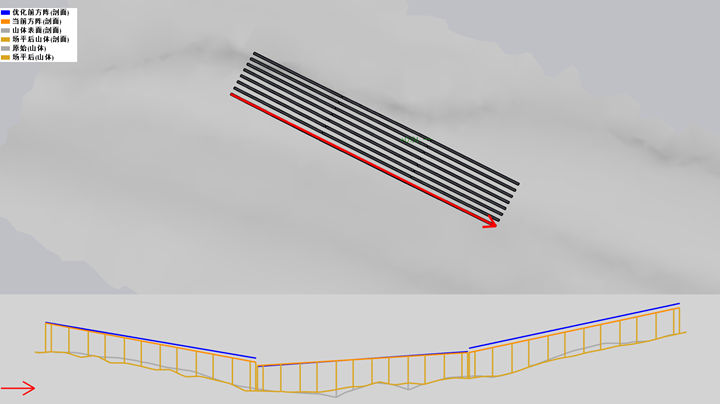
图3-1:方阵轴线方向剖面(地块1,各自土方平衡)
各方案的主要场平结果如下:
|
方案 |
挖方体积(m³) |
填方体积(m³) |
净方体积(m³) |
|
无平衡 |
-4770.06 |
6402.24 |
1632.2 |
|
全局平衡 |
-6015.72 |
5683.88 |
-331.84 |
|
各自平衡 |
-6091.97 |
5832.16 |
-259.81 |
可以看出:
1)不管是全局还是各自平衡,都能达到将土方控制在接近平衡(一般允许部分挖方)的状态;
2)土方平衡的代价是挖方、填方都会增加;
3)各自平衡方案,可减少地块之间的土方运送,但挖填方量会高于总体平衡。